BOSM -4Z2000 Բարձր արագությամբ CNC հորատման և ֆրեզերային մեքենա
1. Սարքավորումների օգտագործումը.
BOSM-1000 հորիզոնական CNC հորատման և ֆրեզերային մեքենան հիմնականում օգտագործվում է փականների, փականների բլոկների, ռեդուկտորների, կցաշուրթերի, սկավառակների, օղակների, պտտվող հենարանների և այլ աշխատանքային մասերի բազմակողմ արդյունավետ հորատման, ֆրեզերային, կտկտոցով և ձանձրալի մշակման համար՝ հաստության արդյունավետ տիրույթում: .Հորատումը, ֆրեզը, կտկտոցը և փորելը կարող են իրականացվել առանձին նյութական մասերի և կոմպոզիտային նյութերի վրա:Մեքենայի մշակման գործընթացը թվայնորեն վերահսկվում է, և շահագործումը շատ հարմար է:Այն կարող է իրականացնել ավտոմատացում, բարձր ճշգրտություն, բազմատեսակ և զանգվածային արտադրություն:
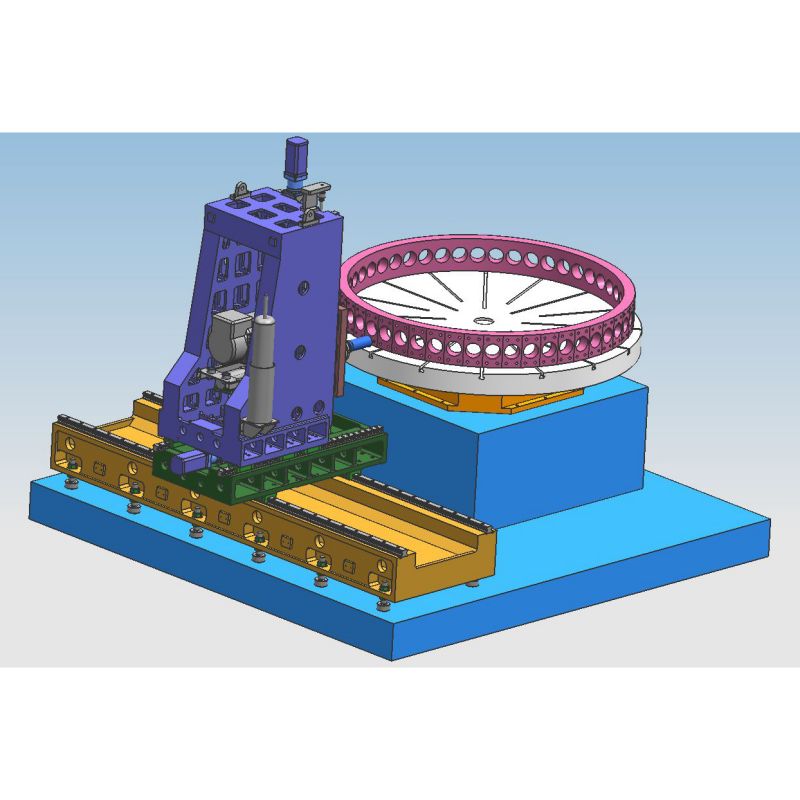
2. Սարքավորումների կառուցվածքը.
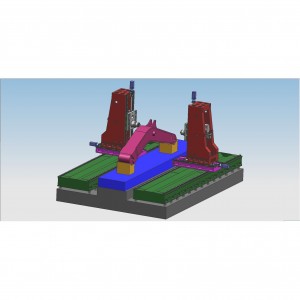
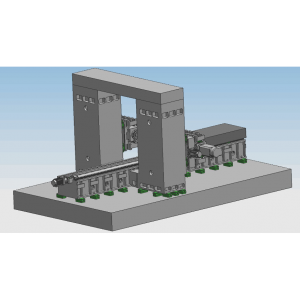
Այս սարքավորումը հիմնականում բաղկացած է մահճակալից, CNC ինդեքսավորման պտտվող սեղանից, շարժական սյունից, շարժական թամբից, հորատման և ֆրեզերային հզորության գլխիկից, ավտոմատ քսում սարքից և պաշտպանությունից, շրջանառվող հովացման սարքից, թվային կառավարման համակարգից, հիդրավլիկ համակարգից, էլեկտրական համակարգից և այլն:Գլանաձև գծային ուղեցույցը հենվում և ուղղորդվում է, իսկ ճշգրիտ պտուտակը շարժվում է:Մեքենան ունի բարձր դիրքավորման ճշգրտություն և կրկնվող դիրքավորման ճշգրտություն:
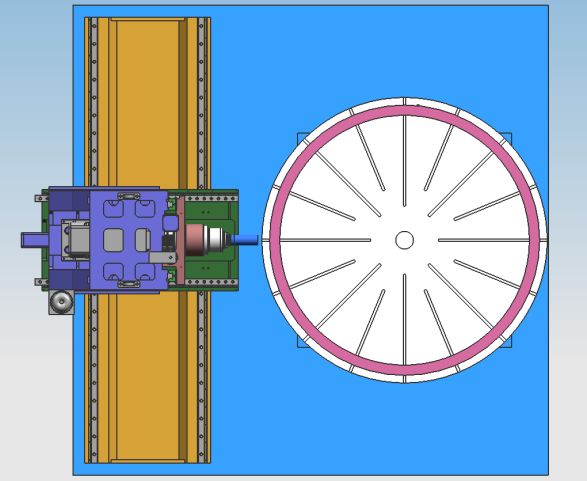
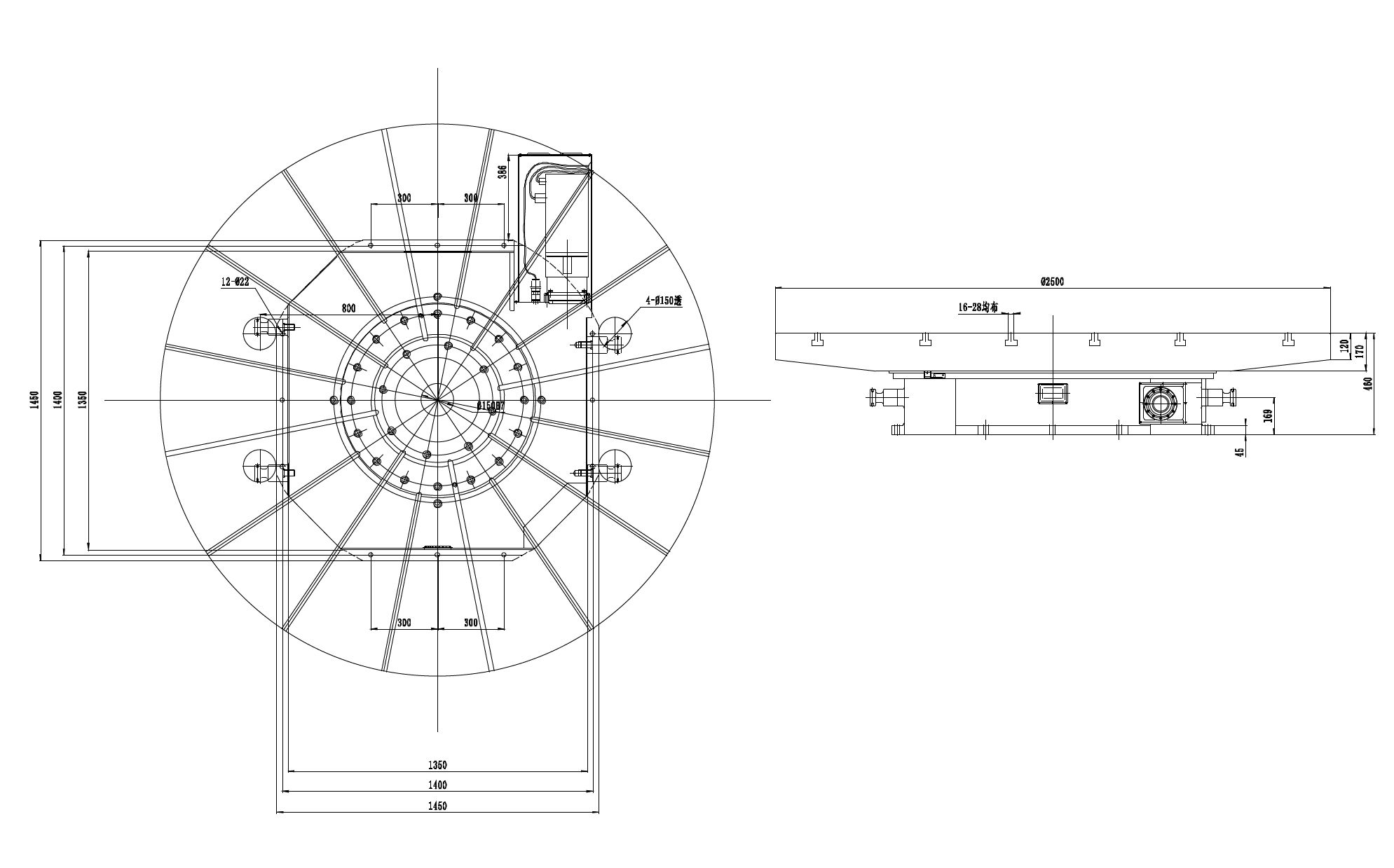
2.1.Մահճակալի աշխատասեղան. Մահճակալը պատրաստված է HT250 թուջե կառուցվածքային մասերից:Այն ավարտվում է երկրորդական կոփումից հետո՝ ներքին լարվածությունը վերացնելու համար:Այն ունի լավ դինամիկ և ստատիկ կոշտություն և ոչ մի դեֆորմացիա:Ճշգրիտ թվային կառավարման ինդեքսավորման ափսե, servo drive 360° կամայական ինդեքսավորման դիրքավորում և օդային/հիդրավլիկ կողպում, շարժիչ համակարգը օգտագործում է AC servo շարժիչը պտտվող լիսեռի հատվածը 360° ավտոմատ կերպով ինդեքսավորելու համար, և ինդեքսավորման ճշգրտությունը մեկ հազարերորդական աստիճան է:Ինդեքսավորման ափսեը տեղադրված է մահճակալի վերին մասում, իսկ կարգավորվող պտուտակները բաժանված են մահճակալի ներքևի մասում, որոնք հեշտությամբ կարող են կարգավորել մահճակալի աշխատասեղանի մակարդակը:
2.2.Շարժական սյուն. Շարժական թուջե կառուցվածքի սյունը ավարտվում է երկրորդական կոփման մշակումից հետո՝ ներքին լարվածությունը հեռացնելու համար:Այն ունի լավ դինամիկ և ստատիկ կոշտություն և ոչ մի դեֆորմացիա:Ճշգրիտ գնդիկավոր պտուտակների զույգը և սերվո շարժիչը ստիպում են սյունակի սահիկը շարժվել Y առանցքի ուղղությամբ:Ճշգրիտ գնդիկավոր պտուտակների զույգը և սերվո շարժիչը ստիպում են սյունակի սահիկը շարժվել X առանցքի ուղղությամբ:Տեղադրեք հորատման միավոր միավորի սլայդի վրա:Սյունակի շարժումը իրականացվում է գնդիկավոր ընկույզի պտտմամբ գնդիկավոր պտուտակի վրա, որը շարժվում է սերվոշարժիչով միացման միջոցով:
2.3.Շարժական թամբը հագեցած է երկու գերբարձր կրող հզորությամբ շարժվող գծային ուղեցույց ռելսերի զույգերով, ճշգրիտ գնդիկավոր պտուտակային զույգով և սերվո շարժիչով, որը մղում է հորատման հզորության գլուխը շարժվելու Z առանցքի ուղղությամբ, ինչը կարող է գիտակցեք Power-ը արագ առաջ շարժվեք, աշխատեք առաջ, արագ հետ դարձրեք, կանգ առեք և այլ գործողություններ:Այն ունի չիպերի ավտոմատ կոտրման, չիպերի հեռացման և դադարի գործառույթներ։
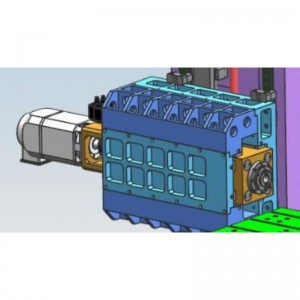
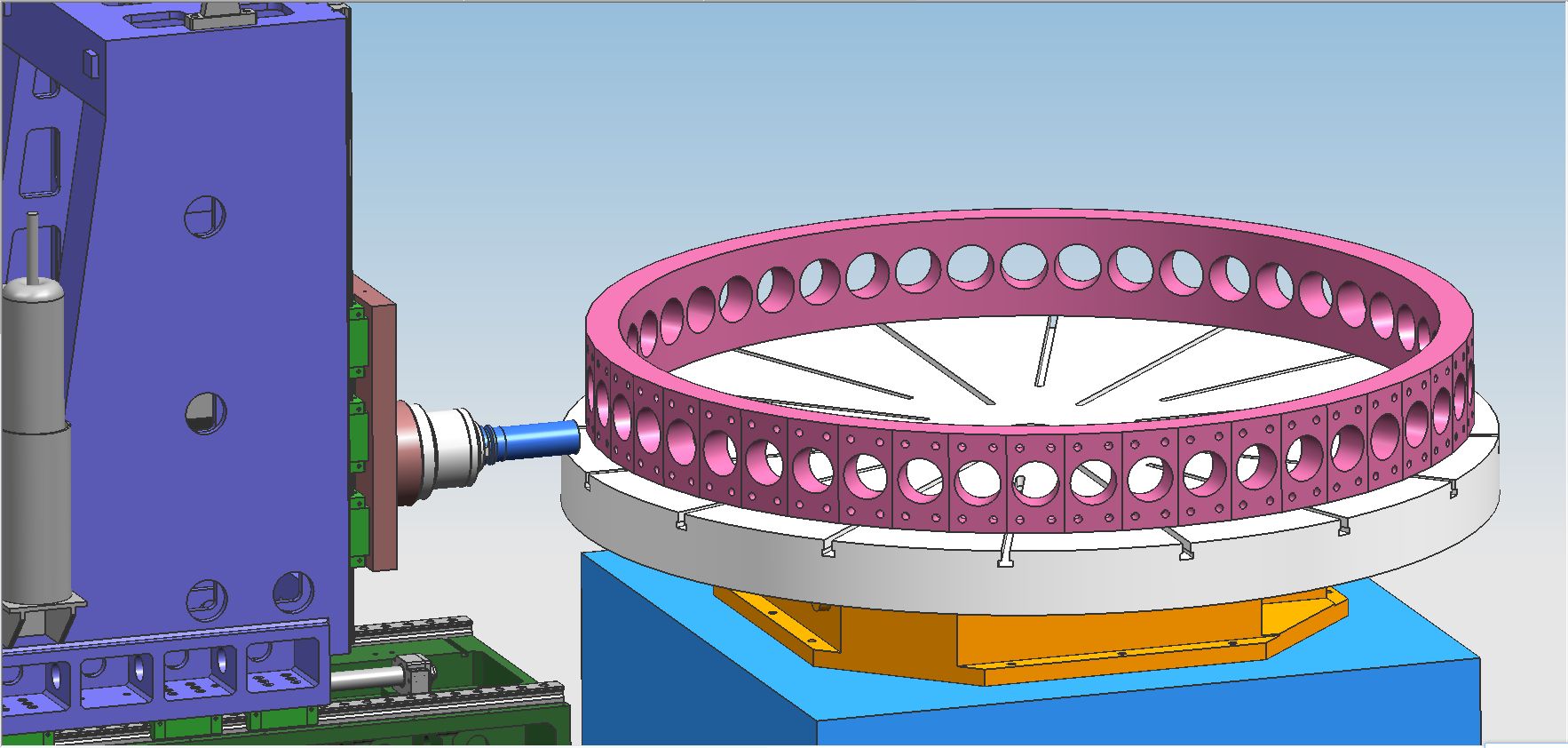
2.4.Հորատման հզորության գլուխը. Հորատման հզորության գլուխը ընդունում է Թայվանի մեխանիկական spindle, իսկ հատուկ ճշգրտության spindle ընդունում է անկյունային շփման կրող, որը գիտակցում է արագության աստիճանական փոփոխությունը բարձր ամրության համաժամանակյա գոտի փոխանցման միջոցով:Աշխատում է սերվո շարժիչներով և գնդիկավոր պտուտակներով:Y-առանցքը կարող է կապված լինել, ընդունել կիսափակ օղակի կառավարում և կարող է իրականացնել գծային և շրջանաձև ինտերպոլացիայի գործառույթներ:Ափի ծայրը BT50 կոն անցք է:
2.5.Ավտոմատ յուղման սարք և պաշտպանիչ սարք.
Այս Մեքենան հագեցած է ավտոմատ քսելու սարքով, որը կարող է ավտոմատ կերպով յուղել շարժվող զույգերը, ինչպիսիք են ուղեցույցները, կապարի պտուտակները և դարակաշարերը:Մեքենա
Z-առանցքները և Y-առանցքները հագեցված են փոշուց պաշտպանիչ ծածկոցներով, իսկ աշխատասեղանի շուրջ տեղադրված են անջրանցիկ շողոքորթիչներ:
2.6.Ամբողջական թվային թվային կառավարման համակարգ.
2.6.1.Չիպերի կոտրման ֆունկցիայի շնորհիվ չիպի կոտրման ժամանակը և չիպի կոտրման ցիկլը կարող են սահմանվել մարդ-մեքենա ինտերֆեյսի վրա:
2.6.2.Հագեցած գործիքի բարձրացման գործառույթով, գործիքի բարձրացման բարձրությունը կարող է սահմանվել մարդ-մեքենա ինտերֆեյսի վրա:Երբ հորատումը հասնում է այս բարձրությանը, գայլիկոնը արագորեն բարձրացվում է աշխատանքային մասի վերին մասում, այնուհետև չիպսերը դեն են նետվում, այնուհետև արագորեն տեղափոխվում են հորատման մակերես և ավտոմատ կերպով վերածվում աշխատանքայինի:
2.6.3.Գործողության կենտրոնացված կառավարման տուփը և ձեռքի միավորը ընդունում են թվային կառավարման համակարգը և հագեցած են USB ինտերֆեյսով և հեղուկ բյուրեղյա LCD էկրանով:Ծրագրավորումը, պահեստավորումը, ցուցադրումը և հաղորդակցությունը հեշտացնելու համար գործառնական միջերեսն ունի այնպիսի գործառույթներ, ինչպիսիք են մարդ-մեքենա երկխոսությունը, սխալի փոխհատուցումը և ավտոմատ ահազանգը:
2.6.4.Սարքավորումն ունի նախադիտելու և մշակելուց առաջ անցքի դիրքը վերստուգելու գործառույթ, և շահագործումը շատ հարմար է
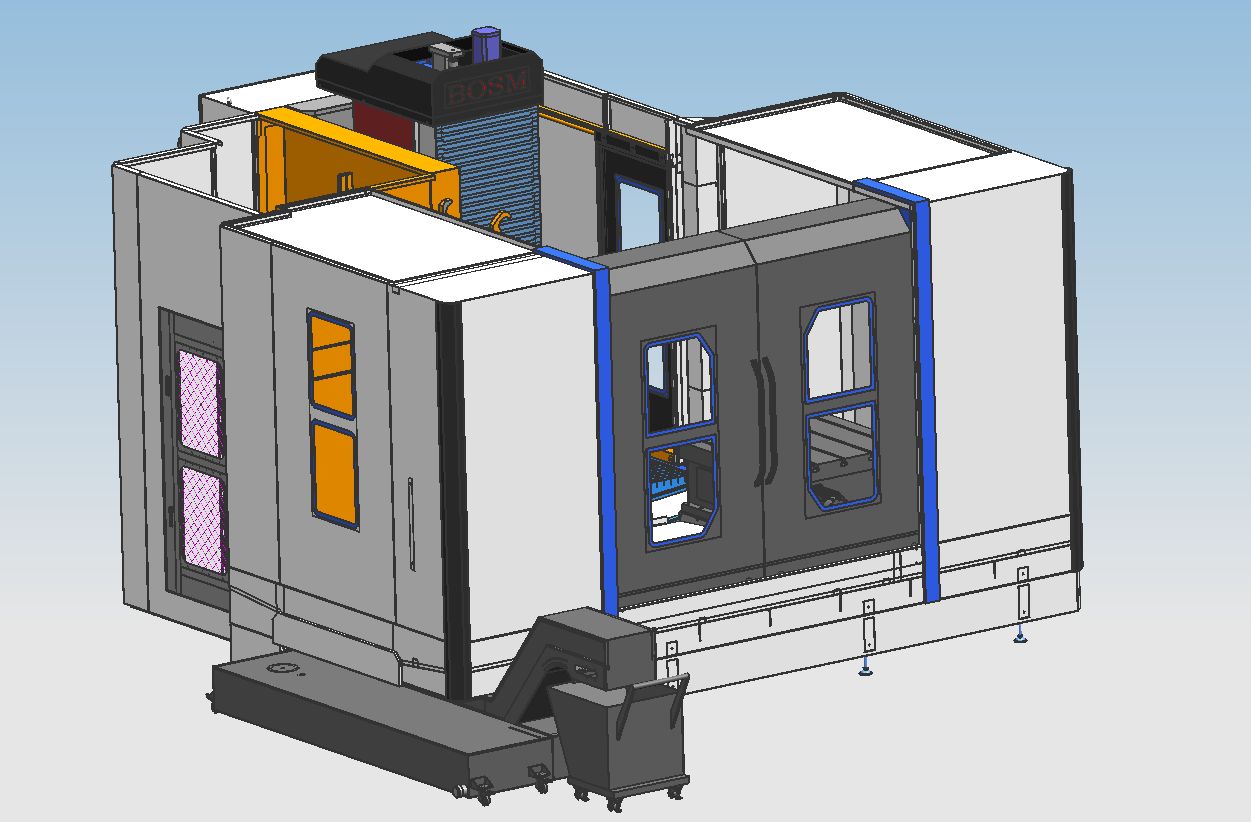
* Մեծ օղակների բարձրացման և սնուցման հարմարավետությունն ապահովելու համար Մեքենան չունի արտաքին պաշտպանություն, և արտաքին պաշտպանությունը կամընտիր է:
3. Մեքենաօգտագործման միջավայր.
Սնուցման աղբյուր՝ Եռաֆազ AC380V±10%, 50Hz±1 Շրջակա միջավայրի ջերմաստիճան՝ 0°~ 45°
4.Տեխնիկական պարամետրեր
| Մոդել | BOSM-1000 | |
| Առավելագույն վերամշակում աշխատանքային մասի չափը | Աշխատանքային մասի առավելագույն պտտվող տրամագիծը (մմ) | ≤Φ2000 |
|
Աշխատանքային սեղան | Աշխատանքային սեղանի չափերը (մմ) քառակուսի | □1000 |
| Աշխատանքային սեղանի չափերը (մմ) կլոր | Ֆ1200 | |
| Հորիզոնական առավելագույն բեռ (կգ) | 5000 | |
|
Ուղղահայաց Ram Drilling Unit | գումար) | 1 |
| Spindle կոն | BT50 | |
| Հորատման տրամագիծը (մմ) | 2-120 թթ | |
| Ֆրեզերային սկավառակի տրամագիծը (մմ) | 200 թ | |
| Հպման տրամագիծը (մմ) | M6-M36 | |
| Հեռավորությունը լիսեռի ծայրից մինչև սեղանի կենտրոն (մմ) | 1000-1600 թթ | |
| Հեռավորությունը լիսեռի կենտրոնից մինչև սեղանի վերին հարթությունը (մմ) | 100-1100 թթ | |
| Spindle արագություն (r/min) | 30-3000 թթ | |
| Spindle շարժիչի հզորությունը (կվտ) | 30 | |
| Աշխատանքային մաս ռոտացիայի առանցք (A առանցք) | Բաժանման առավելագույն թիվը (մմ) | 360° |
| Սահմանեք նվազագույն բաժանման միավորը | 0,001° | |
| A առանցքի սերվո շարժիչի հզորություն (կվտ) | 4.2 | |
| Հզորության գլուխը շարժվում է ձախ և աջ (X առանցք) | Առավելագույն հարված (մմ) | 2000 թ |
| X առանցքի շարժման արագություն (մ/րոպե) | 0~8 | |
| X առանցքի սերվո շարժիչի հզորությունը (կվտ) | 2.4 | |
| Հզորության գլխիկը շարժվում է վեր ու վար (Y առանցք) | Առավելագույն հարված (մմ) | 1000 |
| Y առանցքի շարժման արագություն (մ/րոպե) | 0~8 | |
| Y առանցքի սերվո շարժիչի հզորությունը (կվտ) | 2.4 Արգելակ | |
| Սյունակի երկայնական շարժում (Z առանցք) | Առավելագույն հարված (մմ) | 600 թ |
| Z առանցքի շարժման արագություն (մ/րոպե) | 0~4 | |
| Z առանցքի սերվո շարժիչի հզորությունը (կվտ) | 2.4 | |
| Դիրքորոշման ճշգրտություն | 1000 մմ | ±0,05 |
| Կրկնելիություն | 1000 մմ | ±0,025 |
| CNC ինդեքսավորման աղյուսակի ինդեքսավորման ճշգրտությունը (մմ) |
| 15» |
| Մեքենայի չափսերը (ներառյալ պաշտպանությունը) | Երկարություն (X) × Լայնություն (Z) × Բարձրություն (Y) (մմ) | 5300*6000*3400 |
| Համախառն քաշը (t) ներառյալ պաշտպանությունը | (մոտ) 20 | |