BOSM-1601 Հակառակ գլխի ձանձրալի ֆրեզերային մեքենա
1. Սարքավորումների օգտագործումը
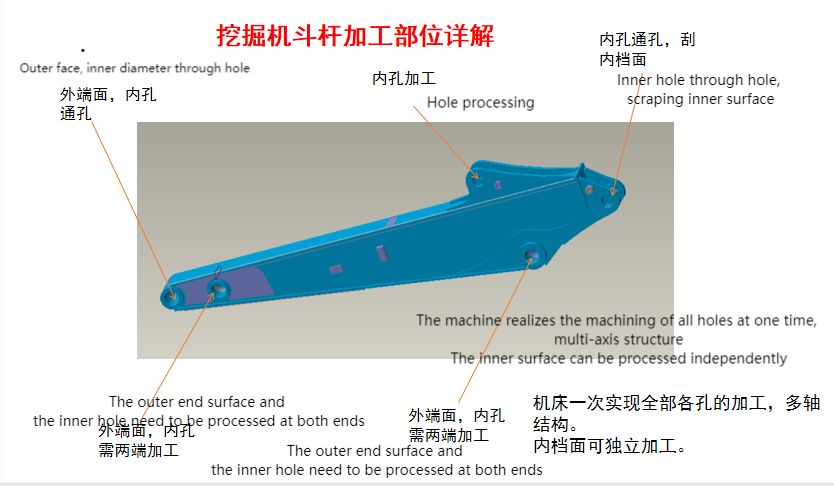
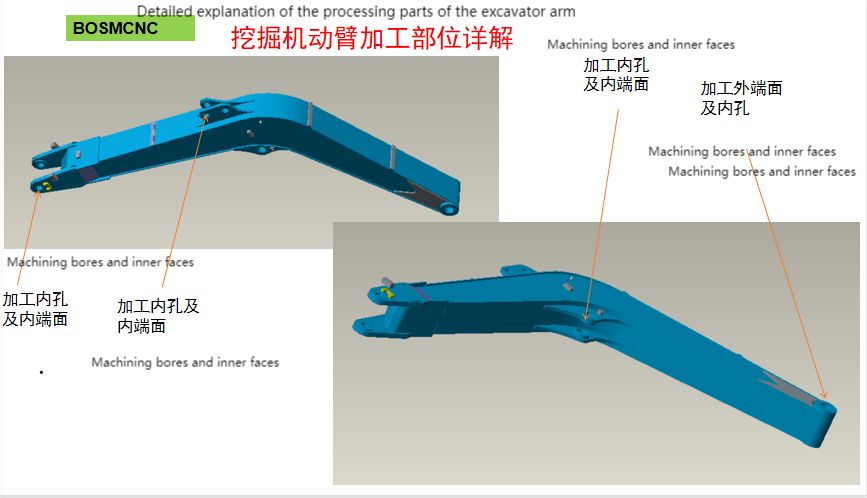
BOSM-1601 երկտեղանի թվային կառավարման սյունակի շարժական երկսյունաձև գլխատող հորատող և ֆրեզերային մեքենան հատուկ մեքենա է շինարարական մեքենաների սիմետրիկ աշխատանքային մասերի համար:Մեքենան հագեցված է հատուկ շարժական սյուներով և հորիզոնական խոյերի երկու հավաքածուով, որոնք կարող են իրականացնել աշխատանքային մասի հորատում, ֆրեզերացում, ձանձրույթ և այլ մշակում արդյունավետ հարվածի տիրույթում, աշխատանքային մասը կարող է միաժամանակ մշակվել տեղում (երկրորդական կարիք չկա սեղմում), արագ բեռնման և բեռնաթափման արագություն, արագ դիրքավորման արագություն, մշակման բարձր ճշգրտություն և մշակման բարձր արդյունավետություն:
2. Մեքենայի հիմնական բաղադրիչները
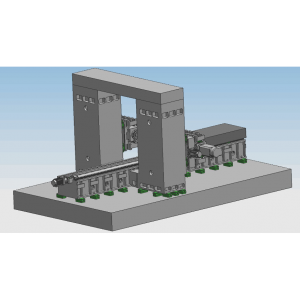
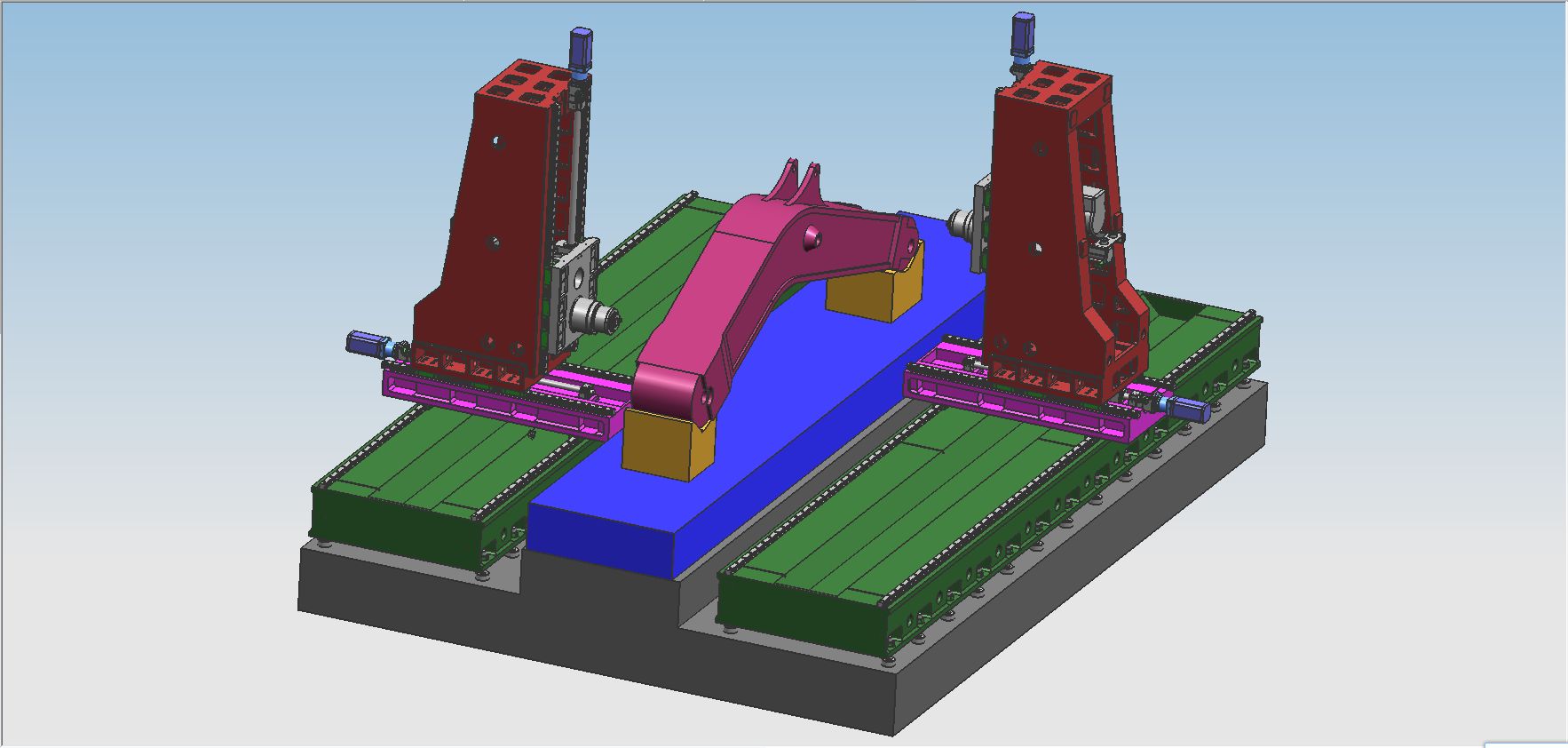
Մահճակալը, աշխատասեղանը, ձախ և աջ սյուները, ճառագայթները, թամբերը, խոյերը և այլ խոշոր մասերը բոլորը պատրաստված են խեժի ավազի ձուլվածքից, բարձրորակ մոխրագույն երկաթից 250 ձուլվածքից, հալված տաք ավազի մեջ→վիբրացիոն ծերացում→տաք վառարանով հնացում→ թրթռումային հնացում→ կոպիտ մշակում→ թրթռումային ծերացում→ տաք վառարանով կռում→ թրթռումային ծերացում→ ավարտում, ամբողջությամբ վերացնում է մասերի բացասական սթրեսը և պահպանում է մասերի աշխատանքը կայուն:Մեքենան ունի այնպիսի գործառույթներ, ինչպիսիք են ֆրեզերային, ձանձրալի, հորատումը, հակասուզումը, կտկտոցը և այլն, և գործիքի հովացման մեթոդը արտաքին սառեցումն է, Մեքենան պարունակում է 6 սնուցման առանցքներ, որոնք կարող են իրականացնել 4 առանցքի միացում և 6 առանցք մեկ գործողություն:Առկա է 2 հոսանքի գլխիկ։Մեքենայի առանցքային ուղղությունը և հզորության գլխիկը ներկայացված են ստորև նկարում:
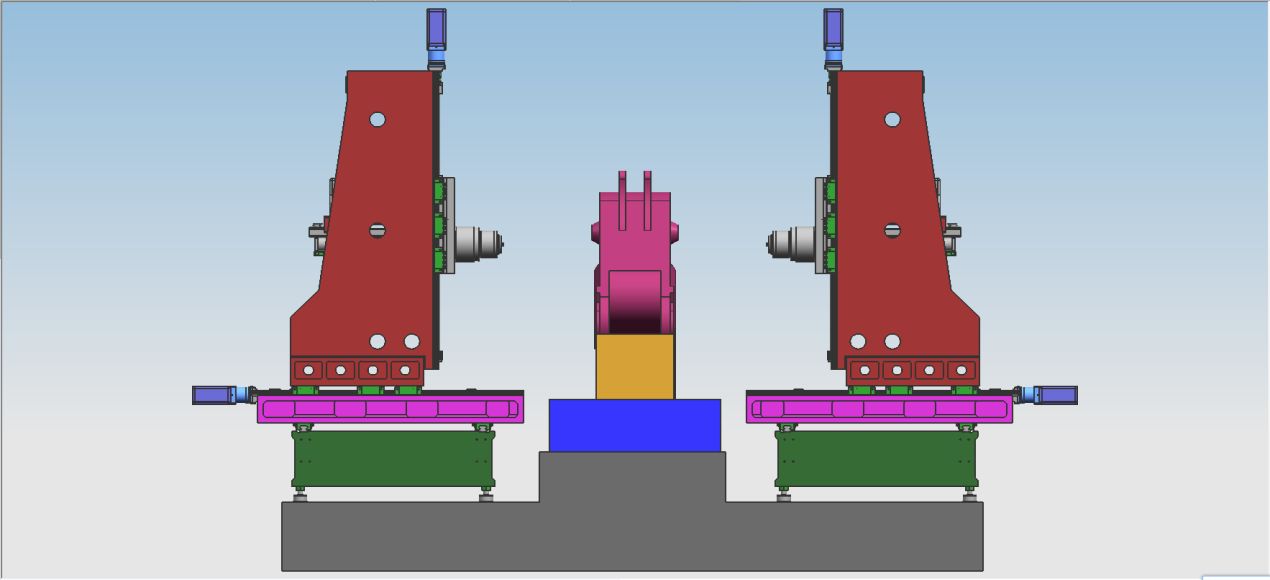
2.1Առանցքային փոխանցման սնուցման մասի հիմնական կառուցվածքը
2.1.1 X1/X2 առանցք:Սյունը երկայնականորեն շրջվում է ամրացված մահճակալի ուղեցույցի երկայնքով:
X-առանցքային փոխանցում. AC-առանցքային փոխանցման տուփ. AC-առանցքի փոխանցման տուփ. AC-առանցքային շարժիչով կառավարվող, բարձր ճշգրտության մոլորակային ռեդուկտորը մղում է երկու սյուները գծային շարժվել X առանցքի երկայնքով գնդիկավոր պտուտակային փոխանցման զույգի միջով:
Ուղղորդող երկաթուղու ձև. Երկու բարձր ամրության գծային ուղղորդող ռելսերը հարթ են դրված:Փոխանցման տուփի զույգում գնդիկավոր պտուտակի ճշգրտության աստիճանը C5 է:
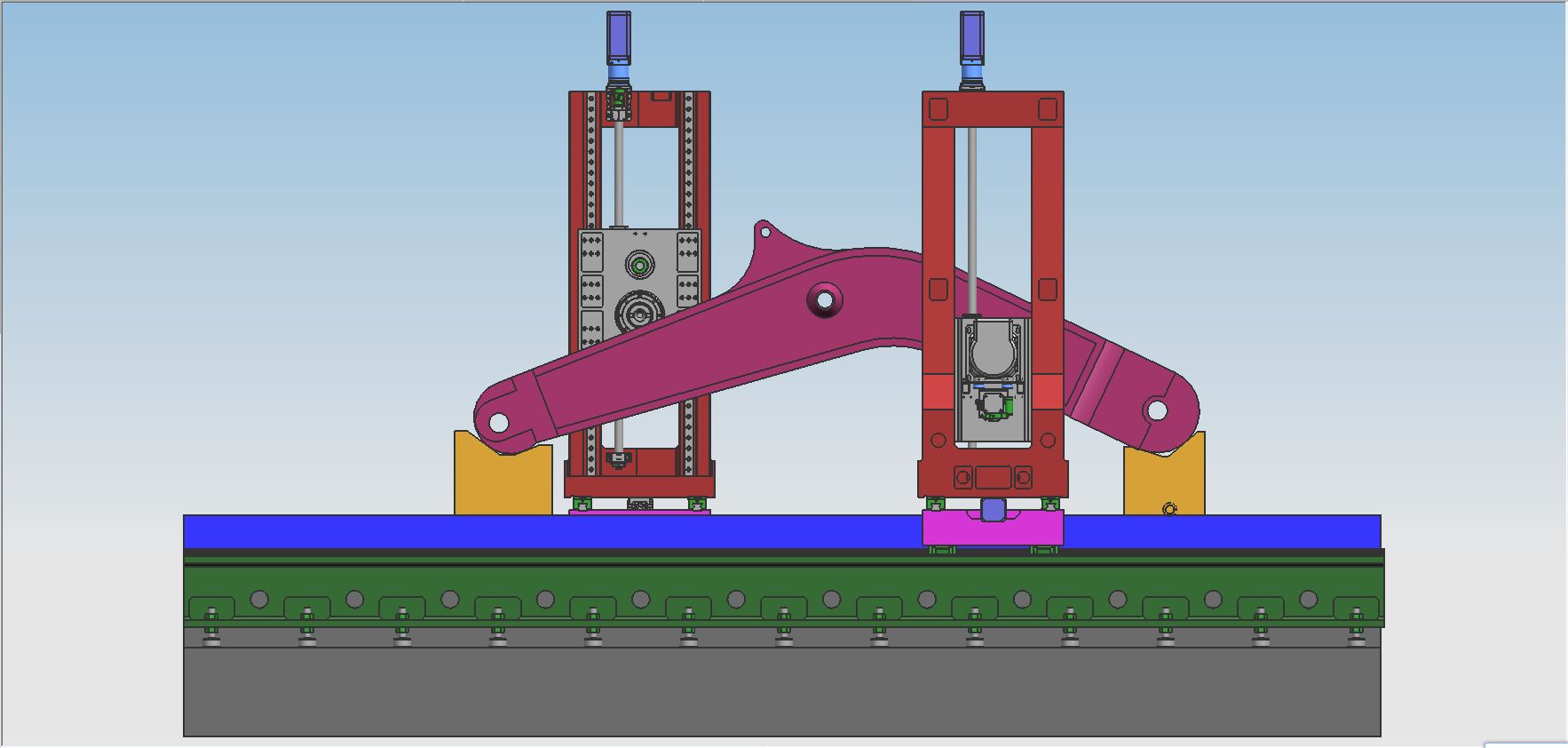
2.1.2 Y1/Y2 առանցք:Հորատման և ֆրեզերային հզորության գլխիկները I, II և դրանց սյուները համապատասխանաբար տեղադրվում են երկու կողմերի բարձր ամրության բազային ուղեցույցների վրա և փոխադարձաբար անցնում են Y1 և Y2 առանցքների երկայնքով բազային ուղեցույցների երկայնքով:AC servo շարժիչը օգտագործվում է գնդիկավոր պտուտակային փոխանցման զույգը վարելու և կառավարելու համար, թամբը քաշելու համար շարժվելու և Y առանցքի երկայնքով գծային շարժումն իրականացնելու համար:
Ուղղորդող երկաթուղու ձև՝ 4 գծային ուղեցույց + գնդաձև պտուտակահան:Փոխանցման տուփի զույգում գնդիկավոր պտուտակի ճշգրտության աստիճանը C5 է, և ընդունված է կիսափակ օղակի կառավարումը:
2.1.3 Z1/Z2 առանցք:Ձանձրացնող և ֆրեզերային հոսանքի գլխիկները I, II և դրանց սահող թամբերը ուղղահայաց տեղադրվում են սյուների առջևի ծայրերում երկու կողմերից և փոխադարձաբար շարժվում են Z1 և Z2 առանցքների երկայնքով վեր ու վար սյունակի ուղեցույցի ռելսերով:
Z1 առանցքի փոխանցման տուփ. AC սերվո շարժիչը օգտագործվում է բարձր ճշգրտության մոլորակային ռեդուկտորը և գնդիկավոր պտուտակով փոխանցման զույգը վարելու և կառավարելու համար, իսկ խոյը շարժվում է Z առանցքի երկայնքով գծային շարժվելու համար:
Ուղղորդող երկաթուղու ձև. Ընդունված են 2 գծային ուղեցույց երկաթուղային կառուցվածք:Փոխանցման տուփի զույգում գնդիկավոր պտուտակի ճշգրտության աստիճանը C5 է:
2.2 Չիպերի հեռացում և սառեցում
Աշխատանքային նստարանի տակ երկու կողմերում տեղադրված են պարուրաձև և հարթ շղթայական չիպային փոխակրիչներ, և չիպսերը կարող են ինքնաբերաբար փոխանցվել չիպային փոխակրիչին վերջում պարուրաձև և շղթայական թիթեղների երկու փուլով քաղաքակիրթ արտադրություն իրականացնելու համար:Չիպային կոնվեյերի հովացուցիչի բաքում կա հովացման պոմպ, որը կարող է օգտագործվել գործիքի արտաքին սառեցման համար՝ ապահովելու գործիքի աշխատանքը և ծառայության ժամկետը, իսկ հովացուցիչը կարող է վերամշակվել:
3.Ամբողջական թվային թվային կառավարման համակարգ.
3.1.Չիպերի կոտրման ֆունկցիայի շնորհիվ չիպի կոտրման ժամանակը և չիպի կոտրման ցիկլը կարող են սահմանվել մարդ-մեքենա ինտերֆեյսի վրա:
3.2.Հագեցած գործիքի բարձրացման գործառույթով, գործիքի բարձրացման հեռավորությունը կարող է սահմանվել մարդ-մեքենա ինտերֆեյսի վրա:Երբ հեռավորությունը հասնում է, գործիքը արագորեն բարձրացվում է, ապա չիպսերը դեն են նետվում, այնուհետև այն արագորեն տեղափոխվում է հորատման մակերես և ավտոմատ կերպով վերածվում աշխատանքի:
3.3.Կենտրոնացված շահագործման կառավարման տուփը և ձեռքի միավորը ընդունում են թվային կառավարման համակարգը և հագեցած են USB ինտերֆեյսով և հեղուկ բյուրեղյա LCD էկրանով:Ծրագրավորումը, պահեստավորումը, ցուցադրումը և հաղորդակցությունը հեշտացնելու համար գործառնական միջերեսն ունի այնպիսի գործառույթներ, ինչպիսիք են մարդ-մեքենա երկխոսությունը, սխալի փոխհատուցումը և ավտոմատ ահազանգը:
3.4.Սարքավորումն ունի անցքի դիրքը մշակելուց առաջ նախադիտելու և նորից ստուգելու ֆունկցիա, և շահագործումը շատ հարմար է։
4.Ավտոմատ քսում
Մեքենայի ճշգրիտ գծային ուղեցույց երկաթուղային զույգերը, ճշգրիտ գնդիկավոր պտուտակային զույգերը և այլ բարձր ճշգրտության շարժման զույգերը հագեցած են ավտոմատ քսման համակարգերով:Ավտոմատ քսայուղային պոմպը թողարկում է ճնշման յուղ, իսկ քսայուղի քանակական խցիկը մտնում է յուղ:Նավթի խցիկը յուղով լցվելուց հետո, երբ համակարգի ճնշումը բարձրանում է մինչև 1,4-1,75 ՄՊա, համակարգում ճնշման անջատիչը փակվում է, պոմպը կանգ է առնում, և բեռնաթափման փականը միաժամանակ բեռնաթափվում է:Երբ ճանապարհի վրա նավթի ճնշումը իջնում է 0,2 ՄՊա-ից ցածր, քանակական քսանյութը սկսում է լցնել քսելու կետը և ավարտում է մեկ յուղի լիցքավորում:Քանակական յուղի ներարկիչի յուղի ճշգրիտ մատակարարման և համակարգի ճնշման հայտնաբերման շնորհիվ նավթի մատակարարումը հուսալի է, ապահովելով, որ յուրաքանչյուր կինեմատիկական զույգի մակերեսի վրա կա նավթի թաղանթ, նվազեցնելով շփումը և մաշվածությունը և կանխելով վնասը: գերտաքացումից առաջացած ներքին կառուցվածքը., ապահովելու Մեքենայի ճշգրտությունն ու կյանքը:Համեմատած լոգարիթմական ուղեցույցի ռելսերի զույգի հետ՝ այս մեքենայում օգտագործվող շարժակազմի գծային ուղեցույցի զույգն ունի մի շարք առավելություններ.
① Շարժման բարձր զգայունություն, պտտվող ուղեցույցի շփման գործակիցը փոքր է, ընդամենը 0,0025-0,01, և շարժիչ ուժը զգալիորեն կրճատվում է, ինչը համարժեք է սովորական մեքենաների միայն 1-ին:/10.
② Դինամիկ և ստատիկ շփման միջև տարբերությունը շատ փոքր է, և հետևողական կատարումը գերազանց է, այսինքն՝ շարժիչ ազդանշանի և մեխանիկական գործողության միջև ժամանակային ընդմիջումը չափազանց կարճ է, ինչը նպաստում է արձագանքման արագության և զգայունության բարելավմանը: թվային կառավարման համակարգը:③ Այն հարմար է բարձր արագությամբ գծային շարժման համար, և դրա ակնթարթային արագությունը մոտ 10 անգամ ավելի բարձր է, քան լոգարիթմական ուղեցույցների արագությունը:④ Այն կարող է իրականացնել առանց բացթողումների շարժումը և բարելավել մեխանիկական համակարգի շարժման կոշտությունը:⑤Արտադրված է պրոֆեսիոնալ արտադրողների կողմից, այն ունի բարձր ճշգրտություն, լավ բազմակողմանիություն և հեշտ սպասարկում:
5.Մեքենայի օգտագործման միջավայր.
5.1.Սարքավորումների օգտագործման բնապահպանական պահանջներ
Շրջակա միջավայրի ջերմաստիճանի մշտական մակարդակի պահպանումը ճշգրիտ հաստոցների համար էական գործոն է:
(1) Շրջակա միջավայրի ջերմաստիճանի մատչելի պահանջներն են -10°C-ից մինչև 35°C, երբ շրջակա միջավայրի ջերմաստիճանը 20°C է, խոնավությունը պետք է լինի 40%-ից մինչև 75%:
(2) Մեքենայի ստատիկ ճշգրտությունը նշված տիրույթում պահպանելու համար շրջակա միջավայրի օպտիմալ ջերմաստիճանը պահանջվում է 15°C-ից 25°C, իսկ ջերմաստիճանի տարբերությունը.
Չպետք է գերազանցի ±2°C/24ժ.
5.2 Սնուցման լարումը` 3 փուլ, 380 Վ, ±10% լարման տատանման միջակայքում, սնուցման հաճախականությունը` 50Հց:
5.3 Եթե աշխատանքային տարածքում լարումը անկայուն է, ապա Մեքենան պետք է ապահովված լինի կայունացված էլեկտրամատակարարմամբ, որպեսզի ապահովի Մեքենայի բնականոն աշխատանքը:
5.4 Մեքենան պետք է ունենա հուսալի հիմնավորում. հիմնավորող մետաղալարը պղնձե մետաղալար է, մետաղալարերի տրամագիծը չպետք է լինի 10 մմ²-ից պակաս, իսկ հողակցման դիմադրությունը փոքր է՝ մինչև 4 ohms:
5.5 Սարքավորման բնականոն աշխատանքային կատարումն ապահովելու համար, եթե օդային աղբյուրի սեղմված օդը չի կարող բավարարել օդի աղբյուրի պահանջները, այն պետք է տեղադրվի Մեքենայի վրա:
Օդից առաջ ավելացրեք օդի աղբյուրի մաքրման սարքի հավաքածու (խոնավացում, յուղազերծում, զտում):
5.6 Սարքավորումը հեռու պահեք արևի ուղիղ ճառագայթներից, թրթռումներից և ջերմային աղբյուրներից, բարձր հաճախականության գեներատորներից, էլեկտրական եռակցման մեքենաներից և այլն, որպեսզի խուսափեք մեքենայի արտադրության ձախողումից կամ մեքենայի ճշգրտության կորստից:
6.Տեխնիկական պարամետրեր
| Մոդել | 1601 թ | |
| Մշակման աշխատանքային մասի չափը | Երկարություն × լայնություն × բարձրություն (մմ) | 16000×1000×1500 |
| Մեքենայի առավելագույն սնուցում | Լայնություն (մմ) | 1300 թ |
| Աշխատանքային սեղանի չափը | Երկարություն X Լայնություն (մմ) | 16000*1000 |
| Սյունակի ճանապարհորդություն | Սյունակի ետ ու առաջ շարժում (մմ) | 1600 թ |
| Spindle վեր ու վար | Ճանապարհորդություն վեր ու վար (մմ) | 1500 թ |
| Բարձրությունը լիսեռի կենտրոնից մինչև սեղանի հարթություն | 100-1600 մմ | |
| Հորիզոնական բարձր ամրության spindle հզորության գլուխը մեկ երկու | Քանակ (2) | 2 |
| Spindle կոն | BT50 | |
| Բրոշ | Ավտոմատ բրոշինգ, ձեռքով գործիքի փոփոխություն | |
| Կտրիչի տրամագիծը (մմ) | ≤Φ200 | |
| Հպման տրամագիծը (մմ) | M3-M30 | |
| Spindle արագություն (r/min) | 30-3000 | |
| Servo spindle շարժիչի հզորությունը (կվտ) | 30*2 | |
|
| Ձախ և աջ ճանապարհորդության հեռավորությունը երկու spindle ծայրերի միջև | 400-1600 մմ |
| Կրկնակի սյունակների ձախ և աջ ճանապարհորդություն (մմ) | 600-ական հատ | |
| Գործիքի սառեցում | Ներքին սառեցում, արտաքին սառեցում | |
| Երկկողմանի դիրքորոշման ճշգրտություն | 300 մմ | ±0,032 |
| Երկկողմանի կրկնվող դիրքավորման ճշգրտություն | 300 մմ | ±0,025 |
| Մեքենայի չափերը | Երկարություն × լայնություն × բարձրություն (մմ) | Ըստ գծագրերի (եթե նախագծման գործընթացում փոփոխություններ լինեն, մենք ձեզ կտեղեկացնենք) |
| Համախառն քաշը (տ) | 72Տ | |