BOSM - Հորիզոնական հաշվիչ հորատման և ձանձրալի մեքենա
1. Սարքավորումների օգտագործումը.
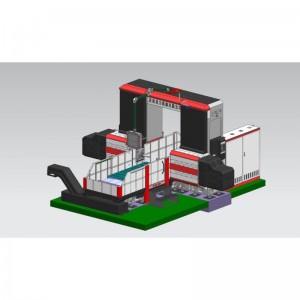
BOSM հորիզոնական հաշվիչ հորատման և ձանձրալի մեքենան հատուկ մեքենա է ձեր ընկերության համար աշտարակային կռունկների գլխարկները մշակելու համար:Մեքենան հագեցած է հորիզոնական հորատման և ձանձրալի ուժային գլխիկների 2 հավաքածուով, որոնք կարող են իրականացնել աշխատանքային մասերի հորատում, ֆրեզերացում և ձանձրացում արդյունավետ հարվածների միջակայքում:Կտրում և այլ մշակում, սարքավորումների տեղադրման արագությունը արագ է, մշակման ճշգրտությունը բարձր է, և մշակման արդյունավետությունը բարձր է:
2. Սարքավորումների կառուցվածքի բնութագրերը.
2. 1. Հիմնական բաղադրիչներըՄեքենա
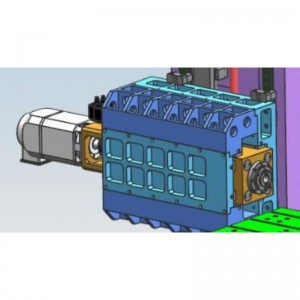
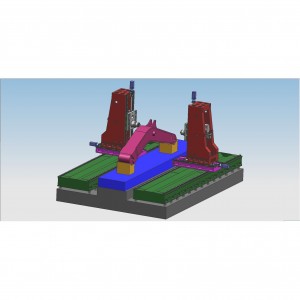
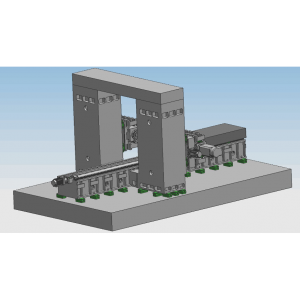
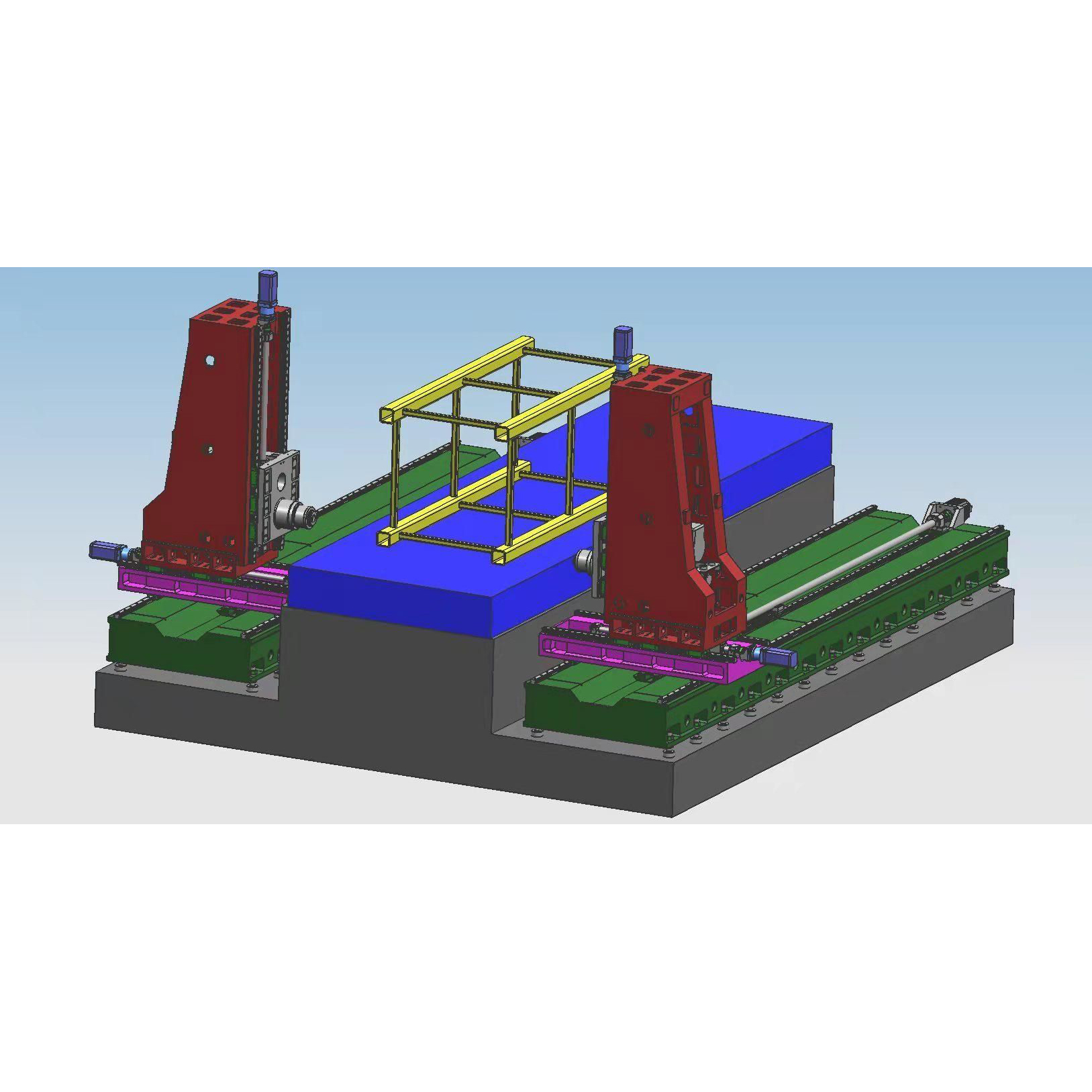
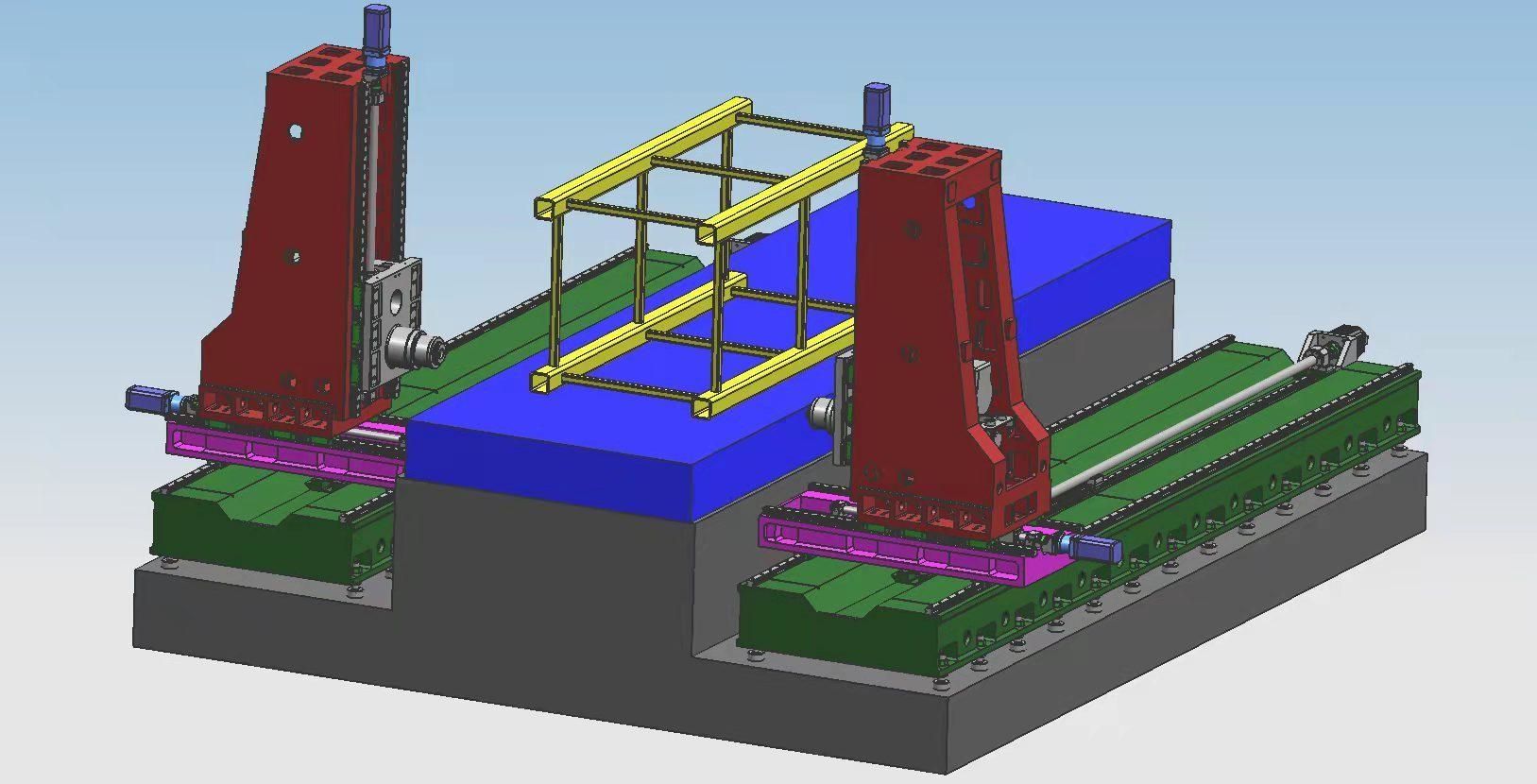
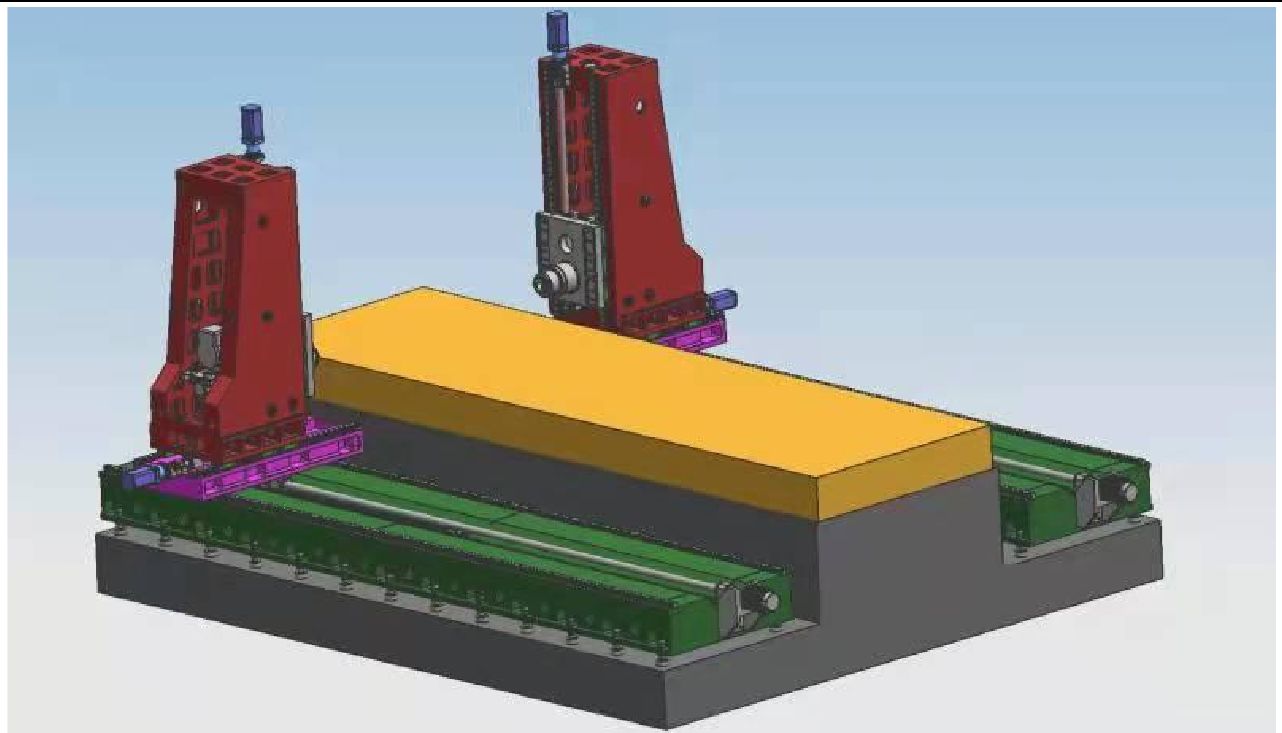
Մեքենայի հիմնական բաղադրիչները՝ մահճակալ, աշխատասեղան, ձախ և աջ սյուներ, թամբեր, խոյեր և այլն, մեծ մասերը պատրաստված են խեժի ավազի ձուլվածքից, բարձրորակ մոխրագույն երկաթից 250 ձուլվածք, եռացված տաք ավազի մեջ→վիբրացիոն ծերացում→տաք վառարանային հնացում→ թրթռումային հնացում→ կոպիտ մշակում→ թրթռումային հնացում→ վառարանային հնացում→ թրթռումային հնացում→ ֆինիշ՝ մասերի բացասական լարվածությունը լիովին վերացնելու և մասերի աշխատանքը կայուն պահելու համար:Սարքավորման աշխատասեղանն ամրացված է, և երկու կողմի հոսանքի գլխիկները կարող են շարժվել բազայի առջևի և հետևի ուղղություններով.Մեքենան ունի այնպիսի գործառույթներ, ինչպիսիք են հորատումը, ձանձրույթը, հակասուզումը, թակելը և այլն: Գործիքի հովացման մեթոդը ներքին սառեցումն է, գումարած արտաքին սառեցումը:Մեքենան պարունակում է 5 սնուցող առանցքներ, 2 կտրող ուժային գլուխներ, որոնք կարող են միաժամանակ սինխրոնիզացվել 5 առանցքների հետ կամ կարող են լինել մեկ գործողությամբ:Մեքենայի առանցքային ուղղությունը և հզորության գլխիկը ներկայացված են ստորև նկարում:
2. 2 Առանցքային փոխանցման սնուցման մասի հիմնական կառուցվածքը
2.2.1 X առանցք. Էլեկտրաէներգիայի գլխիկը կողքից հետ է շարժվում հիմքի ուղեցույցի երկայնքով:
X1 առանցքի շարժիչ. AC սերվոշարժիչը և բարձր ճշգրտության մոլորակային ռեդուկտորը օգտագործվում են հոսանքի գլխիկը գնդաձև պտուտակային շարժիչի միջով քշելու համար՝ X առանցքի գծային շարժումն իրականացնելու համար:
X2 առանցքի փոխանցման տուփ. AC սերվո շարժիչը և բարձր ճշգրտության մոլորակային ռեդուկտորը օգտագործվում են էլեկտրական գլխիկը գնդաձև պտուտակային փոխանցման միջոցով վարելու համար՝ X առանցքի գծային շարժումը իրականացնելու համար:
Ուղեկցող երկաթուղու ձև. Ընդլայնված հիմքի վրա սալիկապատված են երկու բարձր ճշգրտության գծային ուղեցույցներ:
2.2 Y1 առանցք. Էլեկտրաէներգիայի գլխիկը փոխադարձաբար շարժվում է սյունակի վրա վերև վար:
Y1 առանցքի շարժիչ. Ընդունեք AC servo շարժիչը գնդիկավոր պտուտակով վարելու համար Y1 առանցքի գծային շարժումն իրականացնելու համար:Ուղղորդող ռելսերի ձև՝ 4 հատ 45 տիպի գծային ուղեցույց ռելսեր:
2.2.3 Y2 առանցք. Էլեկտրաէներգիայի գլխիկը սյունակի վրա փոխադարձաբար շարժվում է վերև վար:
Y2 առանցքի փոխանցման տուփ. AC servo շարժիչը օգտագործվում է գնդիկավոր պտուտակով քշելու համար՝ Y1 առանցքի գծային շարժումն իրականացնելու համար:
Ուղղորդող ռելսերի ձև՝ 4 հատ 45 տիպի գծային ուղեցույց ռելսեր:
2.2.4 Z1 առանցք. Էլեկտրաէներգիայի գլխիկը ետ ու առաջ է պտտվում թամբի վրա:
Z1 առանցքի փոխանցում. AC սերվո շարժիչը և բարձր ճշգրտության մոլորակային ռեդուկտորը օգտագործվում են շարժումը գնդիկավոր պտուտակով շարժելու համար՝ Z1 առանցքի գծային շարժումն իրականացնելու համար:
2.2.5 Z2 առանցք. Էլեկտրաէներգիայի գլուխը ետ ու առաջ է պտտվում թամբի վրա:
Z2 առանցքի փոխանցման տուփ. AC servo շարժիչը և բարձր ճշգրտության մոլորակային ռեդուկտորը օգտագործվում են շարժումը գնդային պտուտակով շարժելու համար՝ Z2 առանցքի գծային շարժումը իրականացնելու համար:
2.3. Չիպերի հեռացում և սառեցում
Աշխատանքային նստարանի տակ երկու կողմերում տեղադրված են հարթ շղթայական չիպային փոխակրիչներ, և վերջում երկաթե չիպսերը կարող են լիցքաթափվել չիպային փոխակրիչի մեջ՝ քաղաքակիրթ արտադրություն իրականացնելու համար:Չիպային կոնվեյերի հովացուցիչի բաքում կա հովացման պոմպ, որը կարող է օգտագործվել գործիքի ներքին սառեցման + արտաքին սառեցման համար՝ ապահովելու գործիքի աշխատանքը և ծառայության ժամկետը, իսկ հովացուցիչը կարող է վերամշակվել:
3.Ամբողջական թվային թվային կառավարման համակարգ.
3.1.Չիպերի կոտրման ֆունկցիայի շնորհիվ չիպի կոտրման ժամանակը և չիպի կոտրման ցիկլը կարող են սահմանվել մարդ-մեքենա ինտերֆեյսի վրա:
3.2.Գործիքների բարձրացման գործառույթով գործիքի բարձրացման հեռավորությունը կարող է սահմանվել մարդ-մեքենա ինտերֆեյսի վրա:Երբ հեռավորությունը հասնի, գործիքը արագ կբարձրացվի, այնուհետև չիպսերը կնետվեն, այնուհետև արագ առաջ կհասնեն հորատման մակերեսին և ավտոմատ կերպով կվերածվեն աշխատանքի:
3.2.Գործողության կենտրոնացված կառավարման տուփը և ձեռքի միավորը ընդունում են թվային կառավարման համակարգը և հագեցած են USB ինտերֆեյսով և հեղուկ բյուրեղյա LCD էկրանով:Ծրագրավորումը, պահեստավորումը, ցուցադրումը և հաղորդակցությունը հեշտացնելու համար գործառնական միջերեսն ունի այնպիսի գործառույթներ, ինչպիսիք են մարդ-մեքենա երկխոսությունը, սխալի փոխհատուցումը և ավտոմատ ահազանգը:
3.2.. Սարքավորումն ունի նախադիտելու և մշակելուց առաջ անցքի դիրքը կրկին ստուգելու գործառույթ, և շահագործումը շատ հարմար է:
4.Ավտոմատ քսում
Մեքենայի ճշգրիտ գծային ուղեցույց երկաթուղային զույգերը, ճշգրիտ գնդիկավոր պտուտակային զույգերը և այլ բարձր ճշգրտության շարժման զույգերը հագեցած են ավտոմատ քսման համակարգերով:Ավտոմատ քսայուղային պոմպը թողարկում է ճնշման յուղ, իսկ քսայուղի քանակական խցիկը մտնում է յուղ:Երբ նավթի խցիկը լցվում է յուղով, և համակարգի ճնշումը բարձրանում է մինչև 1,4~1,75 ՄՊա, համակարգում ճնշման անջատիչը փակվում է, պոմպը կանգ է առնում, և բեռնաթափման փականը միաժամանակ բեռնաթափվում է:Երբ ճանապարհի վրա նավթի ճնշումը իջնում է 0,2 ՄՊա-ից ցածր, քանակական քսանյութը սկսում է լցնել քսելու կետը և ավարտում է մեկ յուղի լիցքավորում:Քանակական յուղայուղի կողմից մատակարարվող յուղի ճշգրիտ քանակի և համակարգի ճնշումը հայտնաբերելու ունակության շնորհիվ յուղի մատակարարումը հուսալի է և ապահովում է, որ յուրաքանչյուր կինեմատիկական զույգի մակերեսի վրա կա նավթի թաղանթ, որը նվազեցնում է շփումը և մաշվածությունը և կանխում վնասը: գերտաքացումից առաջացած ներքին կառուցվածքին:, ապահովելու Մեքենայի ճշգրտությունն ու կյանքը:
5. Մեքենաօգտագործման միջավայր.
Էլեկտրաէներգիայի մատակարարում՝ Եռաֆազ AC380V±10%, 50Hz±1 Շրջակա միջավայրի ջերմաստիճանը՝ -10°~ 45°
6.Ընդունման չափանիշները:
JB/T10051-1999 «Մետաղ կտրող մեքենաների հիդրավլիկ համակարգերի ընդհանուր տեխնիկական բնութագրեր»
7.Տեխնիկական պարամետրեր:
| Մոդել | 2050-5Զ | |
| Մշակման աշխատանքային մասի առավելագույն չափը | Երկարություն × լայնություն × բարձրություն (մմ) | 5000×2000×1500 |
| աշխատանքային սեղանի չափը | Երկարություն X Լայնություն (մմ) | 5000*2000 |
| Էլեկտրաէներգիայի գլխի բազայի ուղղության ճամփորդություն | Շարժվել ետ և առաջ (մմ) | 5000 |
| Հզորացրեք գլուխը վեր ու վար | Խոյի վեր ու վար հարված (մմ) | 1500 թ |
|
Հորիզոնական խոյի տիպի հորատման հզորության գլխիկ Էլեկտրաէներգիայի գլխիկ 1 2 | Քանակ (2 հատ) | 2 |
| Spindle կոն | BT50 | |
| Հորատման տրամագիծը (մմ) | Ֆ2-Φ60 | |
| Հպման տրամագիծը (մմ) | M3-M30 | |
| Spindle արագություն (r/min) | 30-3000 | |
| Servo spindle շարժիչի հզորությունը (կվտ) | 22*2 | |
| Ձախ և աջ ճանապարհորդություն (մմ) | 600 թ | |
| Երկկողմանի դիրքորոշման ճշգրտություն | 300 մմ * 300 մմ | ±0,025 |
| Երկկողմանի կրկնվող դիրքավորման ճշգրտություն | 300 մմ * 300 մմ | ±0,02 |